大型卡车解析测量的设备,国内现有多种,测量方法根据各自设备的具体特点方法各有不同,但一个基本的原则是必须要遵守的,那就是:尽量要保证样车的整车装配状态关系和零部件实际的安装硬点和尽量完整的点云测量数据。
对于大型卡车来说,整车尺寸大,零部件尺寸大,现有设备很难满足实际测量的需要,现行办法,都是通过测量数据的拼接和把零部件点云数据的对正到整车状态下的办法来实施,这样带来的问题是:
1、测量数据不能保证样车装配状态关系,数据偏差大;
2、累计测量误差大,测量数据的精确度不够大;
3、对正点云数据到整车装配状态下这项工作,对工程师的能力要求高,工作量大,偏差很难控制;
4、受设备自身结构特点决定,部分区域几乎没有办法进行扫描测量,造成数据采集不完整等;
5、测量过程很难保证物体不移动,因此带来测量的反复性,无形中增加了测量的工作量。
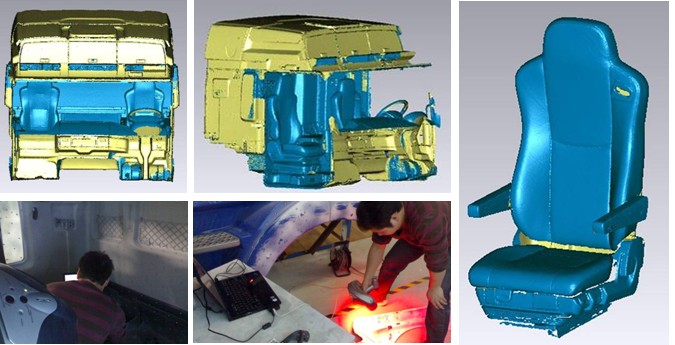
最佳测量方法是:融合各种三维测量设备的具体优点,具有ATIOS设备照相式测量整体定位的能力和快速型,具有Handyscan自定位能力和组合扫描能力,物体可以移动,可在狭小空间和高空作业的能力。
上海君行达汽车科技引进的加拿大handyscan-MAXscan™三维测量设备是将大范围照相式扫描技和HANDYSCAN 技术特有的便携式激光扫描功能合二为一,由于其内置式的照相测量功能,扫描仪能够以极高精度完成对大型工件的数据采集。与测量臂或CMM不同的是,MAXscan在操作过程中无需蛙跳或多次重建参考点,可避免累积误差。
一站式的采集和处理过程:MAXscan独一无二、高精度的参考坐标模式可自动储存和处理所有扫描及照相测量得到的数据,完全一站式处理。由于扫描点采集后直接定位在参考坐标系中,无需额外的后对齐处理。
具体使用方法和技术特点:
1、采用handyscan-MAXscan™三维测量设备的照相式扫描功能,进行整体的定位目标点采集,保证整体尺寸的高精度;
2、采用handyscan-MAXscan™便携式三维激光扫描技术进行特征扫描,由于具有自定位功能,可以边拆车边扫描的组合测量
方法,无论测量物体在什么位置,都可以保证测量数据在整车装配状态下,再也不用依靠工程师进行点云对正和拼接的繁
琐工作,而且从根本上避免了累计误差和人为点云坐标对正带来的偏差。
测量扫描更灵活:在狭窄的空间扫描,物体可以动。如飞机驾驶舱,汽车内部仪表板等。
真正便携式:可装入一只手提箱,十分方便地携带到作业现场或者转移于工厂之间。
最大自由度的操作性:无需连接额外的跟踪和定位装置。此系统操作模式使用户在测量过程中能自由移动机器及被测工件。
自定位技术:创新的定位目标点贴在工件表面,诸如振动、风吹等环境的变化不会对数据采集速度和精度造成任何影响。
嵌入式的照相测量功能: 照相测量软件功能包含照相测量处理、控制软件用于后处理、生成报告、自动在现校准、自动参考
点对齐、匹配纠正及特征测量等功能。
|